Traitements en cas de défaut d’une séquence : (nouveau)
Dans un process liquide il y a en général trois types de réponses d’une séquence à l’apparition d’un défaut.
La multiplication des formats de section peut générer de la confusion.Pour éviter cette confusion et pour faciliter le déploiement du code, la structure d’une section de séquence doit être la même selon le standard IMAP, mais avec des petites différences en fonction de sa réponse aux défauts.
Note : l’apparition d’un défaut entraîne une suspension de la fonction active.
C’est le client qui valide la liste de défauts.
Il faut faire très attention entre un arrêt et une suspension de fonction.
Les trois types de réponses sont :
- Arrêt immédiat de tous les actionneurs concernés par la fonction active (système très simples)
- Arrêt immédiat des pompes / moteurs, fermeture immédiate de vannes d’égout, d’envoi d’eau, d’envoi de produit, d’envoi de solution chimique, etc. (Système plus complexe : souvent plusieurs séquences concernées en même temps)
- Arrêt en cascade des pompes / moteurs, fermeture en cascade de vannes d’égout, d’envoi d’eau, d’envoi de produit, d’envoi de solution chimique, etc. (système très complexe : plusieurs séquences concernées en même temps)
Note : Les « Demandes d’action » sont des boutons liés à une fonction qui permettent la double validation, un aperçu rapide de l’état de la fonction et le blocage du lancement (ou de l’arrêt) si les conditions initiales ne sont pas réunies.
Le problème est qu’une fois la fonction lancée, les conditions de fonctionnement ne sont plus prises en compte. Par exemple, un bouton d’arrêt d’urgence actif empêche le démarrage d’une vidange (activation du bouton/fonction), mais une fois la fonction lancée, le contrôle doit être fait autrement qu’avec la demande d’action.
Note : Dans la gestion de fonctions, il faut faire la distinction entre les conditions initiales, les conditions de sécurité et les conditions process. La différence entre les 3 conditions peut être subtile et nécessite beaucoup d’attention.
Exemple du niveau bas TOR d’une cuve :
- Condition initiale : si le niveau bas n’est pas actif, les fonctions Soutirage et Vidange sont bloquées. En d'autres termes, la cuve doit avoir un niveau suffisant pour démarrer ces opérations.
- Conditions de sécurité : si la fonction Soutirage est active, et le niveau bas se désactive (c'est-à-dire que le niveau de la cuve descend trop), la pompe doit s’arrêter immédiatement. Cette action permet d'éviter tout risque de casse due au fonctionnement de la pompe à sec, et la fonction de soutirage est suspendue.
- Conditions de process : si la fonction Soutirage est active, et le niveau bas se désactive, la pompe s’arrête également, mais cette fois dans le cadre du fonctionnement normal. Pour continuer, soit la fonction Soutirage s’est désactivée, soit la cuve est remplie jusqu'à ce que le niveau bas redevienne actif et permette de relancer le cycle.
Dans cet exemple, la même information peut être traitée dans des manières différentes selon les besoins du client : certaines combinations sont exclusives – on ne peut pas utiliser le niveau bas pour suspendre la fonction de mise en pause et pour l’arrêter en même temps.
3.5.1 Arrêt immédiat pour fonctions simples
Ce type d’arrêt « en cas de défaut » est privilégié pour les fonctions simples telles qu'un asservissement de niveau d’une cuve ou la gestion d’un agitateur. L’arrêt des actionneurs est immédiat et n’implique pas de casses. Par exemple, s’il y a une pompe et une vanne, il faut d’abord arrête la pompe et après, fermer la vanne pour éviter les coups de bélier.
Dans ce type de gestion, il n’y a pas de saut au label L999 mais le grafcet s’est positionné en étape 100 : perte de l’information « Autorisation », qui pour rappel est écrite une seule fois en haut de la séquence :

Figure 31 : NOT MA1_DEF_DISC
(* Pas de défaut discordance sur moteur Agitateur TM1 *)
Écriture des conditions d’autorisation :
Une écriture unique permet un contrôle immédiat dans toute la séquence lorsque les conditions sont modifiées (rajout ou suppression de conditions). S’il n’y a pas de conditions spéciales, il faut mettre TRUE.
Dans l'étape 100, conditions initiales :
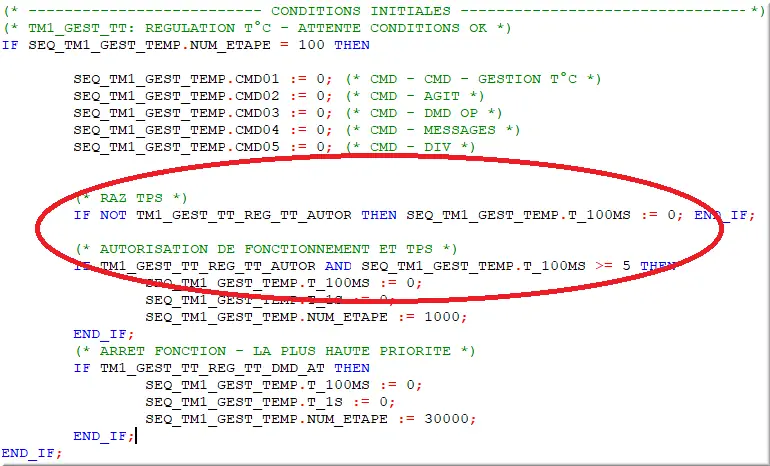
Figure 32 : step 100 Attente conditions ok
Pour démarrer la fonction REGULATION T°C, il faut avoir l’autorisation active (dans ce cas, « pas de défaut de discordance de l’agitateur TM1). Les temps peuvent être modifiables. Cela permet un retardement du démarrage après le réarmement (en fonctions des besoins du client).
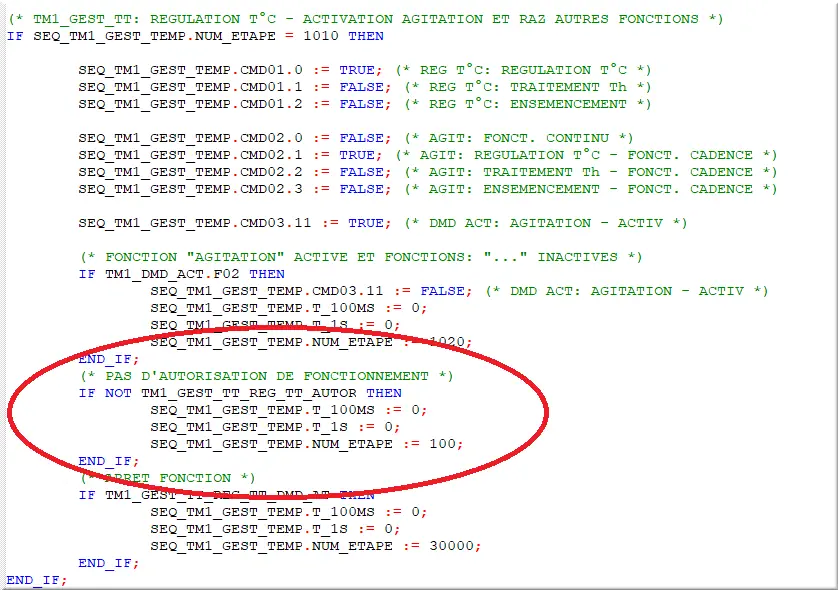
Figure 33 : step 1010 Pas d'autorisation de fnct
Peu importe les étapes dans le grafcet. Dans toutes les étapes 1000 à 1999 de la fonction en cause, il faut rajouter un saut vers l’étape de contrôle où les actionneurs sont à l’arrêt, afin d'obtenir une transition appart des autres conditions pour une gestion plus claire.

Figure 34 : TJRS_0 pas de JMP L999
⚠ Attention : Très important – il ne faut pas de saut au label L999 sinon l’étape reste figée.
3.5.2 Arrêt immédiat pour fonctions complexes
Ce type d’arrêt « en cas de défaut » est privilégié pour les fonctions où seulement une partie des actionneurs doit être coupée. C'est le cas de système complexe où, pendant la suspension d’un transfert, les chemins « vannes » doivent rester ouverts, mais les pompes, les vannes vers l’égout, les alimentations en produit ou l’eau doivent être coupées.
Souvent ce type d’arrêt est utilisé dans les gestions multi séquences telles que la gestion du soutirage, remplissage et transfert, lavages, etc.
Associée à cette gestion, il y a une section Gestion de synthèse écrite en Ladder pour un dépannage rapide où sont gérées toutes les conditions de blocage.
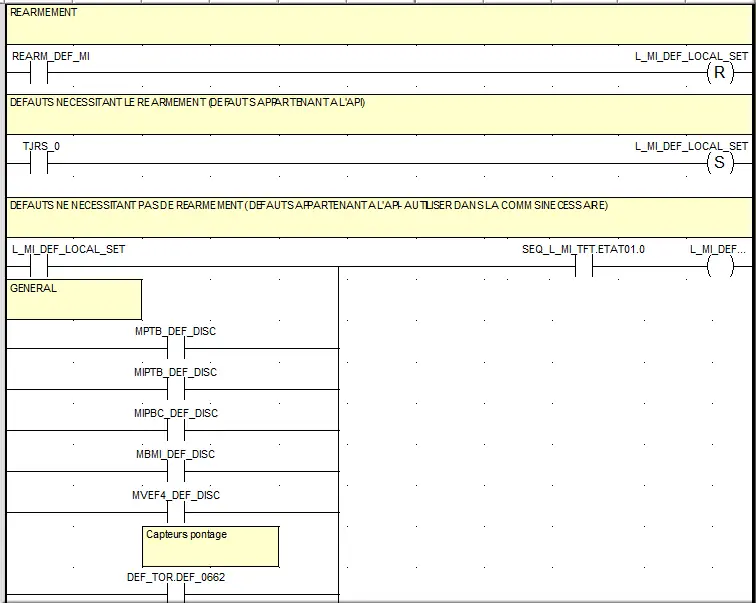
Figure 35 : conditions de blocage
- Réarme le bit de synthèse L_MI_DEF_LOCAL_AVEC_REARMEMENT ;
- Active le même bit par une combinatoire des conditions. S’il n’y a pas, il faut mettre FALSE ou TJRS_0 ;
- Collection des conditions qui activent un nouveau bit de synthèse de la fonction.
Notes : La première condition de ce deuxième bit de synthèse est toujours la synthèse de défauts à réarmer, c'est-à-dire le bit de la deuxième ligne. Il est actif uniquement si la fonction est active.
C’est le bit à utiliser pour la communication inter-api (si besoin d’une synthèse de défauts pour suspendre une fonction dans un autre API) !!
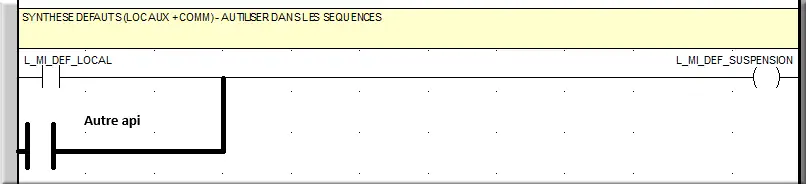
Figure 36 : Set L_MI_DEF_SUSPENSION
La dernière ligne avec le bit de synthèse L_MI_DEF_SUSPENSION qui sera utilisé pour suspendre les fonctions en état (figeage de numéro d’étape et du temps en cours) et blocages de pilotage des éléments critique.
⚠ Attention : Il ne faut JAMAIS utiliser L_MI_DEF_SUSPENSION dans la communication avec d’autres API.Sinon cela créera une boucle sans possibilité de réarmer ce bit de synthèse par l’opérateur mais uniquement par la modification du programme.
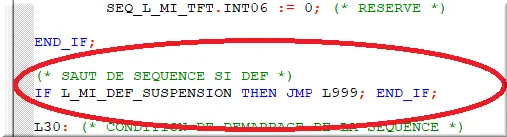
Figure 37 : Figeage SEQ JMP L999
Figeage de la séquence.
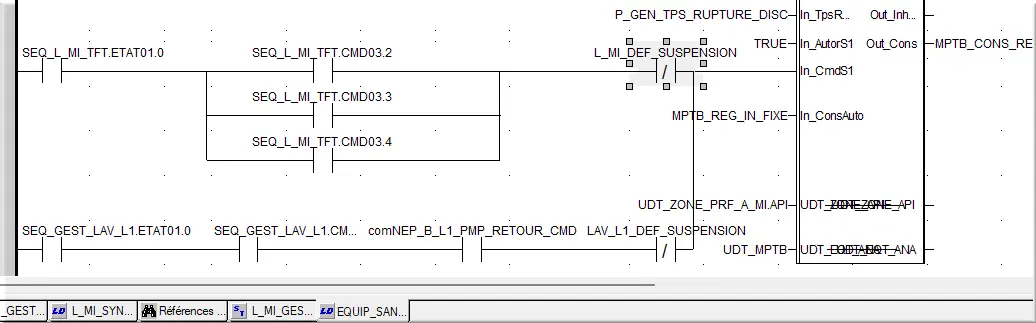
Figure 38 : Bloquer le pilotage d'élément critique
Blocage de pilotage des éléments critiques.
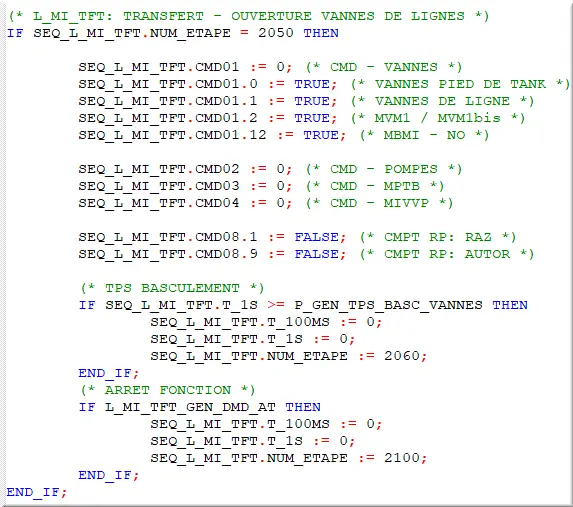
Figure 39 : step 2050 Ouvrir vannes de lignes
Note : si cette méthode de gestion de défauts est utilisée, il ne faut pas écrire de transitions avec le bit d’autorisation (il ne faut pas alourdir le code) pour faire des sauts à l’étape « Attente conditions initiale ». Cette étape doit exister indépendamment du type de gestion de défaut.
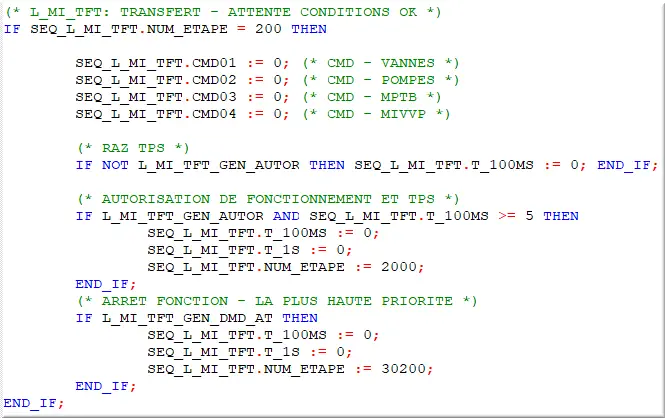
Figure 40 : step 200 Attente conditions ok
Note : Si pour des raisons spécifiques (demande de client) les deux méthodes doivent coexister, il faut s’assurer que les conditions pour le bit d’autorisation ne rentrent pas dans les conditions de gestion de bit de synthèses pour les suspensions !!
3.5.3 Arrêt en cascade
Ce type de gestion est le plus complexe et il est complétement dépendant des équipements ou process. Des exemples d'équipement complexes sont : Pasto, filtration membranaire, évaporateur.
Comme règle générale, pour chaque séquence de gestion, il y a une deuxième séquence où est géré le déroulement de la mise en pause et de redémarrage après une suspension.
Le déclenchent de cette 2e séquence peut-être un bit de synthèse gère comme les bits du point II ;
À l’apparition d’un défaut la séquence de suspension démarré et un bit de commande suspend la séquence de gestion de l’Equipment (figeage de l’étape et du temps), et après, au fil de l’eau, il y a une activation des commandes de suspensions pour les diffèrent éléments de l’Equipment :
Le passage d’une étape à l’autre est conditionné par du temps ou par d’autre mesure. Exemple : après l’arrêt des pompes, il faut un temps mini de quelques secondes ou une baisse de pression en dessous un certain seuil.
Exemple :
- Suspension de pompes ;
- Suspension d’arrivage de produits / eau ;
- Suspension des énergies telles que le chauffage ou le refroidissement ;
- Figeage des positions de vannes de régulation, etc.
À la disparition du défaut, les différents sous-ensembles ou éléments redémarrent dans le sens inverse de la suspension.
Note : Sauf demande spéciale si la suspension est annulée avant la suspension de tous les éléments, le redémarrage reprends avec le dernier élément suspendu.
Exemple : si la séquence de mise en pause est en phase de suspendre l’arrivage des produits, le redémarrage bascule dans l’étape où l’envoi de produit est autorisé et, après dans l’étape, où les pompes redémarrent, sans passer par les phases de suspension des énergies, figeage de régulations, etc.
Pareil si, pendant les phases de redémarrage, un nouveau défaut réapparaît, les suspensions continuent avec le dernier élément suspendu et avec un passage par l’étape initiale.